




Contact us
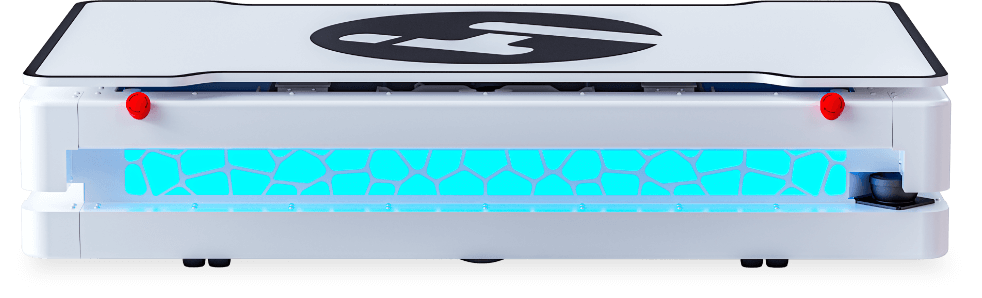



FR AGV
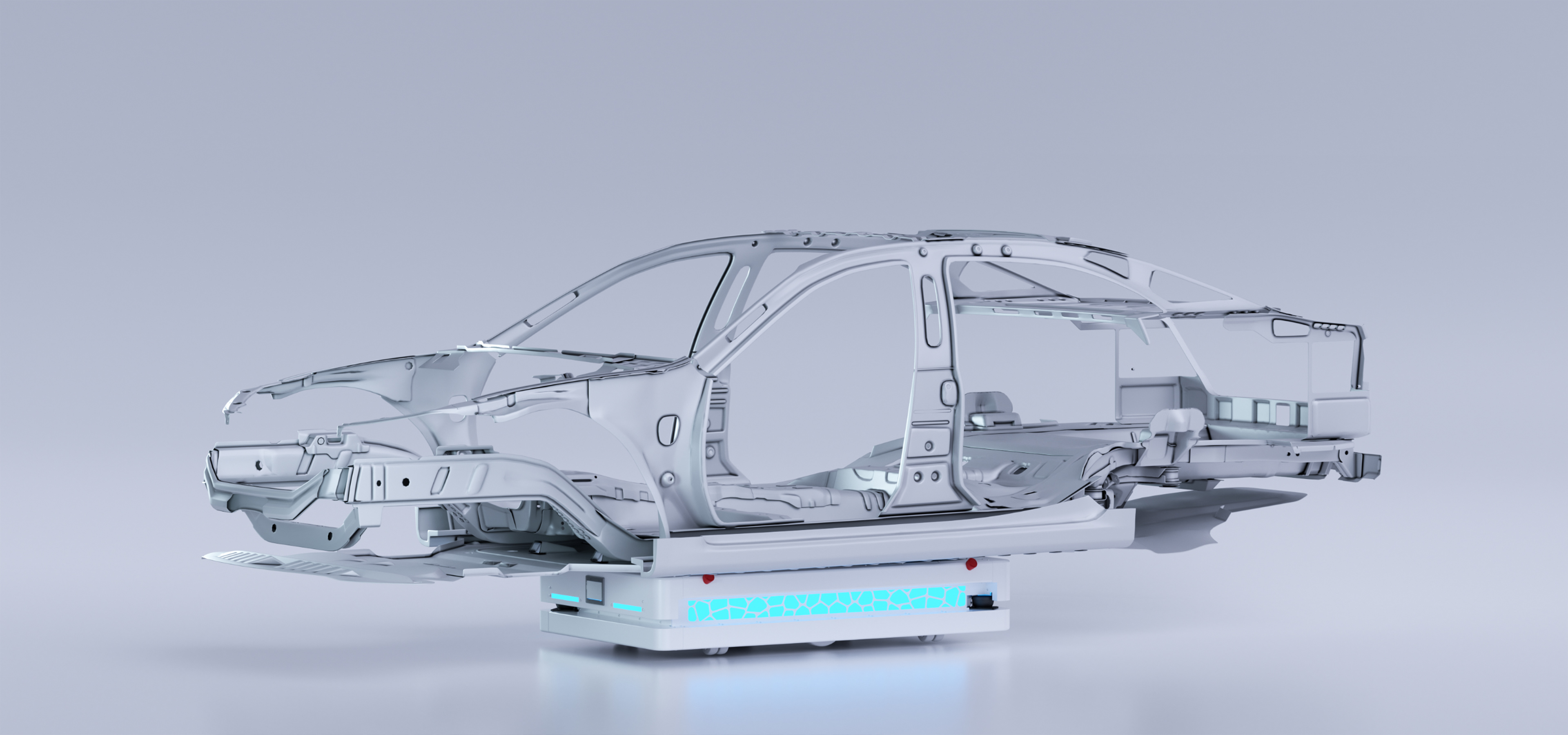
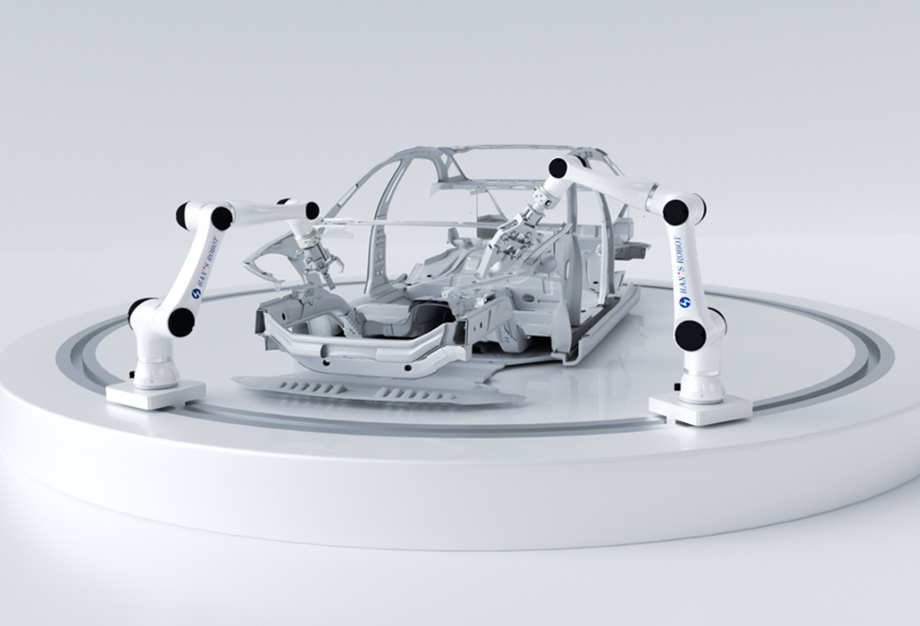
FR is a new generation of multi-sensing autonomous vehicles from Han's Robot, used for indoor intralogistics tasks. It can autonomously transport items and navigate freely in its environment. As a mobile robot, it makes the labor of the workers easier and improves business efficiency. This robot is also equipped with obstacle avoidance radar, which can work continuously and safely without interruption. Moreover, it has built-in autonomous navigation system and dispatching software, which enable multiple FR to serve simultaneously, keep the production running and maintain the flexibility of its manipulation.
Contact us
Features
- Fast Charging - High speed charging and long endurance
- Heavy Payload - Payload 200kg / 1200 kg
- High Level of Safety - 3D Visual Sensor (optional)
- High Speed - MAX Speed 1.5 m/s
Multi-sensing Autonomous Vehicle
Healthcare



Technical Specs:
| Model | FR-200 | FR-1200 | |
| Basic parameters | Payload | 200 kg | 1200 kg |
| MAX Loading Current | 20A | 95A | |
| Actuation | Differential Drive | ||
| MAX Velocity | 1.5 m/s | ||
| Communication Interface | TCP/IP , Modbus | ||
| Outbound Interface | WiFi , 1 x RJ45 | ||
| IP Classification | IP54 | ||
| Weight(lifting units) | (100/120) kg | (280/310) kg | |
| Dimensions | L900×W670×H230(mm) | L1570×W950×H310(mm) | |
| Positioning Accuracy | ±10mm | ||
| Safety Laser Scanner 360° | PLd/ Category 3 (ISO 13849‒ 1) | ||
| Navigation Mode | Laser SLAM | ||
| Lifting Units | 1x200kg , 1 x 0-60mm | 4x400kg , 4 x 0-50mm | |
| Battery parameters | Battery Voltage | DC 48v | |
| Battery Capacity | 46AH | 125AH | |
| Charging Voltage | AC220V , 50-60Hz | ||
| Charging Time | 2hr(s Automated)/ 1.5hrs(Manual) | 2.5hr(s Automated)/ 2hrs(Manual) | |
| Running Time (no load) | 15h | 24h | |
| Charging Mode | Automated / Manual | ||
| Sensor | Vision (optional) | RealSense ‒ D415 Camera | |
| Safety | Touchless Safe Human Detection | Safety Scanners | ||
| Software | Operating Software | Robot application software / Dispatching software | |
| Open Architecture | AGV API | ||
| Safety Features | Safe Human Detection, Safe Speed Control | ||
| Programming Features | Human-Robot-Interaction | Motion tracking, PC based GUI | |
| Environment Visualization | Dynamic Mapping (SLAM) | ||
| Fleet Management | Formation Driving, Fleet Monitoring Tool | ||
| Others | Warranty | 12 months | |
Options and Accessories
ABOUT HAN'S LASER CORPORATION
Han's Laser Corporation is a wholly-owned subsidiary of Han's Laser Technology Group, a global industrial laser technology leader.
We are committed to providing our customers with the latest industrial laser machine technology to suit their particular needs better.
Headquartered in the U.S., employed by knowledgeable, trained personnel. Han's Laser is transforming the industry with our state-of-the-art machines.
Han's Laser Technology Industry Group Co., Ltd, a public company established in 1996, has become the Chinese national laser industry's flagship and one of the world's most famous laser equipment manufacturers. Han's Laser went public in Shenzhen Stock Exchange Market in 2004. And as of today, its market value reaches more than 7 Billion USD.
We are committed to providing our customers with the latest industrial laser machine technology to suit their particular needs better.
Headquartered in the U.S., employed by knowledgeable, trained personnel. Han's Laser is transforming the industry with our state-of-the-art machines.
Han's Laser Technology Industry Group Co., Ltd, a public company established in 1996, has become the Chinese national laser industry's flagship and one of the world's most famous laser equipment manufacturers. Han's Laser went public in Shenzhen Stock Exchange Market in 2004. And as of today, its market value reaches more than 7 Billion USD.
CLIENTS















The global leader in laser technology
2220 O'Toole Ave, San Jose, CA 95131, USA
4224 Clay Business Dr, Katy, TX 77449




Products
© 2020 Han's Laser Corporation. All Rights Reserved.